Robust and Efficient Embedded Convex Optimization through First-Order Adaptive Caching
Abstract
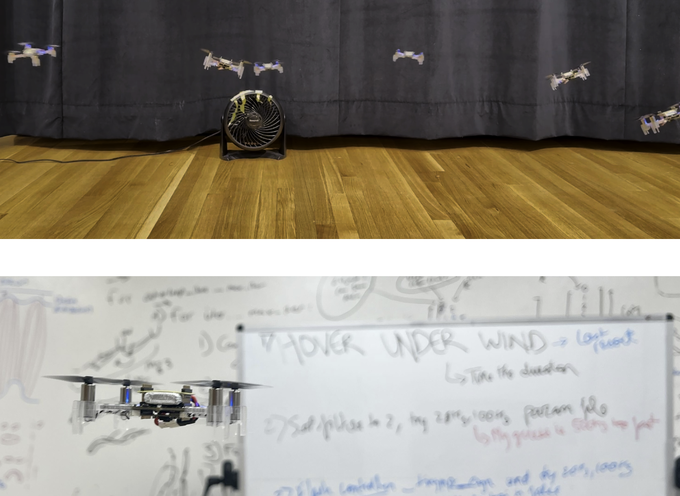
Recent advances in Model Predictive Control (MPC) leveraging a combination of first-order methods, such as the Alternating Direction Method of Multipliers (ADMM), and offline precomputation and caching of select operations, have excitingly enabled real-time MPC on microcontrollers. Unfortunately, these approaches require the use of fixed hyperparameters, limiting their adaptability and overall performance. In this work, we introduce First-Order Adaptive Caching, which precomputes not only select matrix operations but also their sensitivities to hyperparameter variations, enabling online hyperparameter updates without full recomputation of the cache. We demonstrate the effectiveness of our approach on a number of dynamic quadrotor tasks, achieving up to a 63.4% reduction in ADMM iterations over the use of optimized fixed hyperparameters and approaching 70% of the performance of a full cache recomputation, while reducing the computational cost from O(n^3) to O(n^2) complexity. This performance enables us to perform figure-eight trajectories on a 27g tiny quadrotor under wind disturbances. We release our implementation open-source for the benefit of the wider robotics community.