Best Paper in Automation at IEEE ICRA 2024
Finalist for Best Conference Paper at IEEE ICRA 2024
Finalist for Best Student Paper at IEEE ICRA 2024
Biography
I am an Assistant Professor of Computer Science at Dartmouth College where I lead the Accessible and Accelerated Robotics Lab (A²R Lab). I was previously an Assistant Professor of Computer Science at Barnard College where I also held affiliate positions in the Department of Computer Science and Electrical Engineering at Columbia University. I am also a co-chair for the Tiny Machine Learning Open Education Initiative (TinyMLedu) and the IEEE-RAS TC on Model Based Optimization for Robotics (TCOptRob).
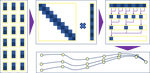
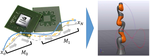
My research is focused on optimizing robotic systems at all scales by developing, optimizing, implementing, and evaluating next-generation algorithms and edge computational systems, through algorithm-hardware-software co-design (e.g., MPCGPU, GRiD, TinyMPC). As such, my research is at the intersection of Robotics and Computer Architecture, Embedded Systems, Numerical Optimization, and Machine Learning.
I also want to promote a responsible, sustainable, and accessible future for robotics and edge computing, including the development of new interdisciplinary, project-based, open-access courses that lower the barriers to entry for cutting-edge topics like robotics, parallel programming, and embedded machine learning (e.g., Global TinyML Education, Parallel Optimization for Robotics).
I enjoy spending my free time with my family and skiing in the winters.
Interests
- Realtime Optimal Control
- Parallel Computing on CPUs, GPUs and FPGAs
- Robot Locomotion and Manipulation
- Embedded Machine Learning
- STEM Education
Education
-
PhD in Robotics, 2022
Harvard University
-
MEng in Robotics, 2018
Harvard University
-
Advanced Study Non-Degree Student, 2016
Massachussets Institute of Technology (MIT)
-
BA in Computer Science, 2013
Harvard University